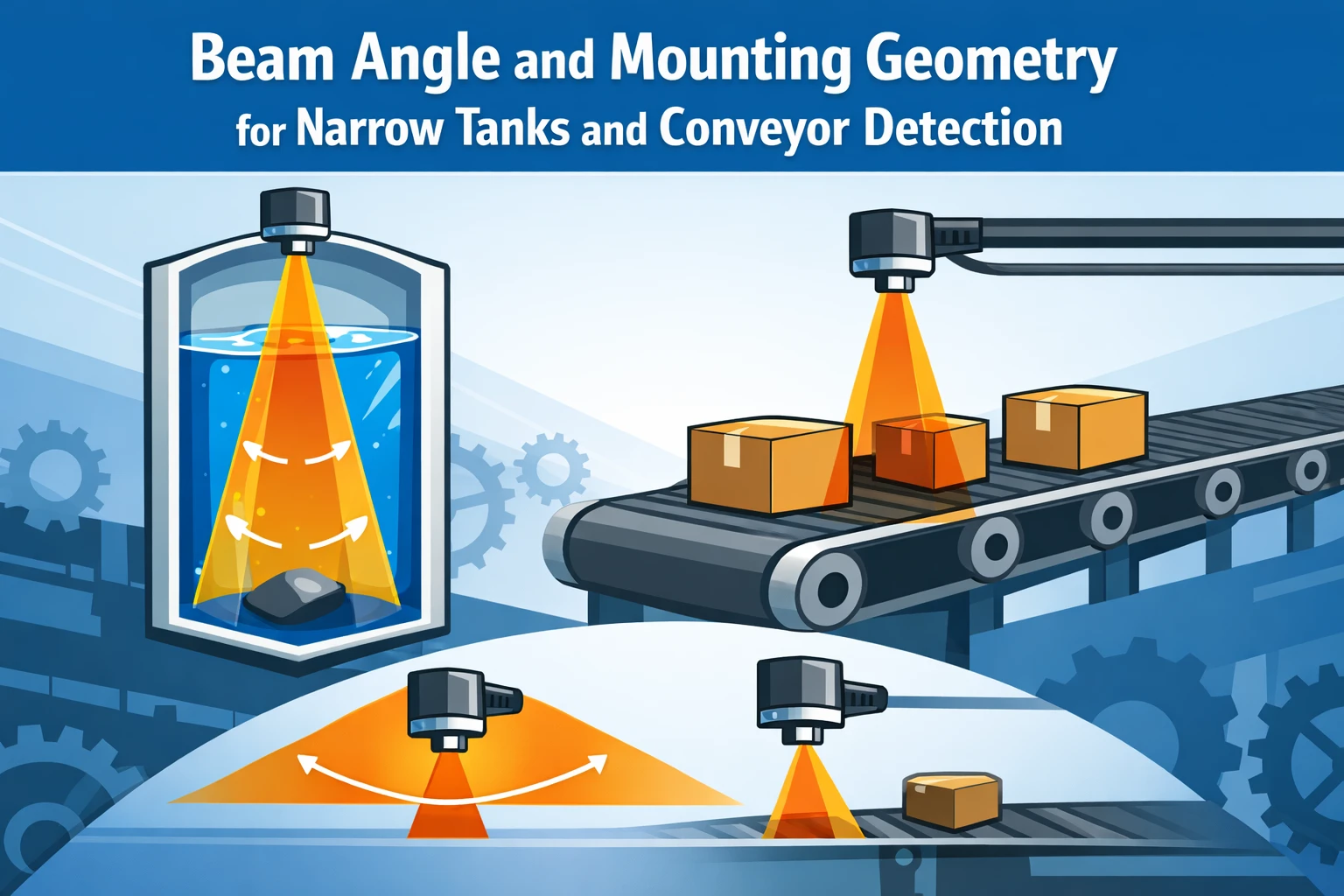
좁은 탱크 및 컨베이어 감지를 위한 빔 각도 및 장착 형상
많은 초음파 센서 프로젝트는 범위가 종이에 정확해 보이는 경우에도 실패합니다. 선택한 모델이 목표에 도달할 수 있고, PLC가 올바르게 배선되었으며, 벤치 테스트가 깨끗하게 보이지만 설치된 시스템은 여전히 불안정한 판독값 또는 잘못된 전환을 생성합니다. 대부분의 경우 실제 문제는 기하학입니다.
빔 각도, 벽 간격, 노즐 깊이, 브래킷 강성 및 타겟 폭은 설치 후 음향 경로가 제어 상태로 유지되는지 여부를 결정합니다. 좁은 탱크에서는 에코가 액체 표면에서 돌아오기 전에 측벽에 부딪힐 수 있습니다. 컨베이어에서 빔이 의도한 목표 대신 측면 레일, 인접한 차선 또는 진동 브래킷을 잡을 때 동일한 기하학적 실수가 나타납니다. 다른 애플리케이션, 동일한 통합 실패.
이 기사는 엔지니어링 팀이 다음을 평가하는 현장 기하학 플레이북으로 작성되었습니다. 센서 제품 허브, 핵심 MU30 센서, 그리고 더 넓은 공급업체 역량을 통해 초음파 변환기 공급업체 페이지. 일반적인 M18 대 M30 비교를 반복하지 않으며 첫 번째 원칙의 사각지대 이론을 다시 실행하지도 않습니다. 그 임무는 샘플 승인 전에 빔 각도와 장착 형상을 어떻게 검사해야 하는지 보여주는 것입니다.
문제 상황
초음파 감지는 의도한 대상까지의 거리뿐만 아니라 전체 반향 경로 제어에 달려 있기 때문에 "범위 일치" 설치가 여전히 실패할 수 있습니다. 좁은 용기와 제한된 기계 프레임에서 센서는 한 표면에만 상호 작용하지 않습니다. 이는 벽, 노즐 립, 뚜껑, 스탠드파이프, 레일, 가드, 롤러 가장자리 및 효과적인 빔 설치 공간 내에 들어갈 만큼 가까운 모든 단단한 물체와 상호 작용합니다.
좁은 탱크는 충전 수준에 따라 형상이 변경되기 때문에 이 문제를 특히 비용이 많이 듭니다. 탱크 상단 근처의 노즐과 상부 벽은 가장 강력한 반사경이 될 수 있습니다. 하단 근처에서는 사각지대와 벽의 수렴으로 인해 사용 가능한 마진이 무너질 수 있습니다. 결과적으로 한 작동 지점에서는 허용 가능한 것처럼 보일 수 있지만 시동, 거의 비어 있는 작동 또는 최종 충전 단계에서만 신뢰할 수 없게 될 수 있습니다.
컨베이어 감지는 가장 명확한 비유입니다. 용기 내부의 측벽 반사는 차선의 측면 레일 반사가 되며 동일한 기하학적 논리가 여전히 적용됩니다.
범위만으로는 잘못된 확신을 갖게 되는 이유
팀은 종종 거리 창을 포함하는 첫 번째 샘플을 구매합니다. 애플리케이션에 600 mm ~ 1800 mm이 필요한 경우 2 m 또는 4 m에 도달하는 모델을 선택하고 문제가 해결되었다고 가정합니다. 이 지름길은 세 가지 결정적인 질문, 즉 작동 거리에서 효과적인 음향 공간이 얼마나 커지는지, 근처의 하드 반사판이 메인 로브에 얼마나 가까이 있는지, 센서가 자체 사각지대나 사용할 수 없는 영역 근처에서 작동해야 하는지 여부를 무시합니다.
이것이 바로 이 기사가 기하학 우선주의를 유지하는 이유입니다. 폼 팩터 간의 컨베이어별 비교가 필요한 경우 다음을 사용하십시오. 전용 M18 대 M30 컨베이어 가이드. 주요 관심사가 최소 감지 거리와 링다운 동작인 경우 다음을 사용하세요. 사각지대 기술 기사. 여기서 목표는 매개변수 조정이 시작되기 전에 설치 형상 자체가 실행 가능한지 여부를 결정하는 데 도움을 주는 것입니다.
형상으로 인한 실패의 일반적인 증상
- 안정적이지만 거리가 잘못됨: 센서는 대상 대신 벽, 노즐 가장자리, 레일 또는 고정 브래킷에 고정됩니다.
- 간헐적인 전환: 약간의 기계적 오정렬이나 진동으로 인해 빔이 의도한 목표물과 근처의 단단한 반사경 사이로 이동합니다.
- 높거나 낮은 수준 근처에서만 실패: 레벨이 설치 경계에 가까워질수록 탱크 기하학적 구조는 음향적으로 더 단단해집니다.
- 큰 개체에서는 작동하지만 좁은 대상에서는 실패합니다. 효과적인 빔 설치 공간이 대상보다 넓거나 주변 구조물로 누출됩니다.
- 설명할 수 없는 샘플 불일치: 한 설치는 작동하지만 다른 설치는 전자 장치가 아닌 장착 형상이 시험 사이에 변경되었기 때문에 작동하지 않습니다.
엔지니어링 제약
모델을 선택하기 전에 좁은 탱크 및 컨베이어 애플리케이션을 가장 자주 중단시키는 형상 변수를 잠급니다. 이렇게 하면 팀이 불완전한 RFQ를 보낸 다음 소프트웨어 필터링으로 기계적 레이아웃 문제를 해결하려고 시도하는 것을 방지할 수 있습니다.
1) 빔 각도는 격리된 상태가 아닌 탱크 직경에 대해 읽어야 합니다.
데이터시트에 인쇄된 빔 각도는 그 자체로는 의미가 없습니다. 중요한 것은 해당 빔이 실제 격리 거리에 걸쳐 어떻게 확장되는지입니다. 좁은 원통형 탱크에서는 중간 정도의 원뿔이라도 중심선이 액체 표면에 도달하기 전에 벽과 교차할 수 있습니다. 특히 센서가 최대 충전 수위보다 높거나 노즐 내부에 장착된 경우 더욱 그렇습니다. 벽이 유효 면적에 들어가면 시스템은 더 이상 하나의 깨끗한 반향 경로를 평가하지 않습니다.
이것이 중거리 전차 설치가 종종 주변에 자연스럽게 착륙하는 이유입니다. MU30으로 표시되는 중거리 탱크 센서 클래스. 현재 제품 페이지에는 200~6000 mm의 광범위한 작업 범위가 포함되어 있어 컨테이너 및 사일로에 유연성을 제공하지만 이러한 유연성은 여전히 탱크 직경 및 장착 높이를 기준으로 심사해야 합니다. 모델은 실수가 아닙니다. 스크리닝되지 않은 형상은 다음과 같습니다.
2) 노즐 및 스탠드파이프 형상은 공정 표면보다 더 강한 에코를 생성할 수 있습니다.
깊은 노즐은 의도하지 않은 음향 터널처럼 작동할 수 있습니다. 열린 헤드스페이스로 발사되는 대신 빔은 먼저 노즐 벽, 립 또는 내부 솔기와 상호 작용합니다. 실제로 이는 제어 시스템이 신뢰하기 쉽고 시운전 팀이 진단하기 어려운 명백히 안정적인 에코를 생성할 수 있습니다. 직경이 너무 작거나 내부가 거칠거나 센서 축이 중앙에 있지 않은 경우 스탠드파이프에서도 동일한 문제가 나타납니다.
조달 및 설치 검토를 위해 노즐 직경, 노즐 높이, 센서 오목 깊이, 파이프 내부가 매끄러운지 계단식인지 여부를 수집합니다. 해당 값이 누락된 경우 전기 사양이 아무리 상세하더라도 견적이 불완전합니다.
3) 사각지대와 최소 측정 가능 수준을 함께 검사해야 합니다.
두 번째 기하학적 실수는 사각지대를 장착 레이아웃과 별개의 주제로 취급하는 것입니다. 그들은 같은 결정입니다. 응용 분야에서 얕은 용기 상단 근처 또는 헤드 공간이 거의 없는 용기에서 안정적인 판독이 필요한 경우 측정 창이 완료되기 전에 센서가 사용할 수 없는 영역에 접근할 수 있습니다. 그 시점에서 시스템의 정확성이 떨어지는 것은 아닙니다. 안정적인 탐지가 더 이상 문서화되지 않은 지역에서 작동하고 있습니다.
바로 그곳이 컴팩트 MU18 옵션 가치있게 됩니다. 단거리 디자인과 더 작은 사각지대 프로필은 범용 중거리 장치보다 근접 장착 상황에 훨씬 더 적합합니다. 애플리케이션이 매우 엄격한 여유 공간을 요구하는 경우 올바른 질문은 "MU30을 작동하도록 조정할 수 있습니까?"가 아닙니다. 그러나 "기하학을 처음부터 MU18에 다시 할당해야 합니까?"
4) 컨베이어 차선 폭과 측면 레일로 인해 야외에서 동일한 형상 충돌이 발생함
컨베이어에서는 형상 오류가 더 눈에 띄는 방식으로 나타납니다. 센서가 좁은 차선 위에 너무 높게 장착되면 유효 설치 공간이 레일, 가이드 플레이트 또는 인접 제품에 끼일 수 있습니다. 대상이 부드럽거나 불규칙하거나 예상보다 작은 경우 레일은 실제로 감지하려는 상자, 트레이 또는 부품보다 더 깨끗한 에코를 반환할 수 있습니다. 이것이 바로 컨베이어 애플리케이션이 탱크 작업에 유용한 정신 모델인 이유입니다. 두 경우 모두 유용한 빔 설치 공간에서 근처 구조물을 보호하는 것입니다.
고속이거나 물리적으로 좁은 차선의 경우 제한된 복도에서 조준하는 것이 더 쉽기 때문에 모델 선택이 MU18쪽으로 이동할 수 있습니다. 더 긴 스탠드오프나 더 큰 대상 영역의 경우 MU30은 여전히 잘 작동하지만 차선 폭, 레일 거리 및 대상 치수가 장착 검토의 일부로 선별된 경우에만 가능합니다.
5) 브래킷 강성은 센서 정렬만큼 중요합니다.
잘 조준된 센서는 진동이 시작된 후에는 불량한 센서가 될 수 있습니다. 긴 캔틸레버 브래킷, 얇은 L 플레이트 및 지지되지 않는 스탠드오프는 주기마다 반향 경로를 변경하는 기계적 움직임을 발생시킵니다. 탱크에서 이러한 움직임은 빔을 벽이나 노즐 가장자리쪽으로 이동시킵니다. 컨베이어에서는 빔을 레일 쪽으로 흔들거나 좁은 대상 창에서 멀어지게 합니다. 근본 원인이 기계적 공진인 경우 결과적으로 잘못된 스위칭이 신호 잡음으로 인해 발생하는 경우가 많습니다.
장착 하드웨어를 감지 시스템의 일부로 취급하십시오. 브래킷이 유연한 경우 종이의 빔 각도는 더 이상 사용 중인 빔 각도가 아닙니다. 2점 지지대, 더 짧은 스탠드오프, 견고한 브리지 스타일 마운트는 일반적으로 설치 후 필터를 튜닝하는 것보다 더 나은 현장 안정성을 제공합니다.
6) 공칭 빔 각도가 효과적인 감지 공간과 동일하지 않음
이러한 구별은 많은 자격 프로젝트가 잘못되는 부분입니다. 공칭 빔 각도는 일반적으로 통제된 조건에서 정의되며 모든 실제 대상, 모든 재료 또는 근처의 모든 간섭 소스를 설명하지는 않습니다. 효과적인 감지 공간은 대상 크기, 대상 반사율, 표면 모양, 장착 거리 및 환경 소음에 따라 달라집니다. 즉, 공장이나 탱크 팜에서 중요한 설치 공간은 카탈로그 값에서 상상한 설치 공간보다 더 넓을 수 있습니다.
따라서 공학적 규칙은 보수적인 심사입니다. 형상이 종이상에서는 거의 허용되지 않는 것처럼 보이더라도 일반적으로 현장에서는 허용되지 않습니다. 의도한 대상 영역과 근처 하드 반사판 사이에 여백을 두십시오. 마진이 없으면 다른 모델을 선택하거나, 스탠드오프를 줄이거나, 샘플 승인 전에 브래킷을 다시 디자인하십시오.
선택 매트릭스
샘플을 비교하기 전에 다음 매트릭스를 사용하여 형상 제약 조건을 모델 및 장착 결정으로 변환합니다.
| Scenario | 주요 기하학 위험 | 기본 장착 규칙 | 추천 모델 | 구현 노트 |
|---|---|---|---|---|
| 중간 정도의 스탠드오프를 갖춘 좁은 원통형 탱크 | 표면 에코가 지배적이 되기 전의 측벽 클리핑 | 센서를 중앙에 유지하고 최대 빈 거리에 넉넉한 벽 여백을 두십시오. | MU30 | 탱크가 너무 얕지 않고 장착 축이 안정적으로 유지될 수 있을 때 가장 좋습니다. |
| 노즐 또는 스탠드파이프가 있는 탱크 | 노즐 립 또는 파이프 벽으로 인해 초기 잘못된 에코가 발생함 | 견적 전 리세스 깊이 최소화 및 노즐 직경 검증 | MU30 또는 SR55 | 높이 및 측벽 거부 여유가 범용 장치의 Comfort Zone을 초과하는 경우 SR55으로 이동 |
| 최소 레벨이 가까운 얕은 상자 | 사각지대가 필수 측정 창과 겹칩니다. | 스탠드오프를 줄이고 최대 범위보다 짧은 사용 불가능 영역을 우선시합니다. | MU18 | 센서가 대상 가까이에서 작동해야 하는 경우 추가 범위 용량보다 컴팩트한 구조가 더 중요합니다. |
| 측면 레일이 있는 좁은 컨베이어 | 레일은 제품보다 더 강한 울림을 반환합니다. | 타겟 간섭이 발생하지 않도록 최대한 낮게 중앙에 장착하세요. | MU18 | 차선 너비와 격리 여백이 둘 다 확실히 적절한 경우에만 MU30을 사용하세요. |
| 혼합된 타겟 너비와 보호된 장착 공간을 갖춘 컨베이어 | 가변 반사율 및 이동 브래킷 정렬 | 견고한 마운팅을 사용하고 가장 작은 실제 대상의 설치 공간을 확인합니다. | UltraNova2 또는 MU30 | UltraNova2은 원통형 범용 본체보다 컴팩트한 보호 설치가 더 중요한 경우에 유용합니다. |
샘플 승인 전 필드 형상 확인
- 인근 하드 반사경 지도: 설치를 시작하기 전에 벽, 노즐 가장자리, 레일, 가드 및 브래킷을 나열해야 합니다.
- 최소 및 최대 작동 거리를 표시하십시오. 하나의 중간 범위 지점만 사용하여 샘플을 검증하지 마십시오.
- 가장 작은 실제 목표를 확인하십시오. 발자국이 대형 평판에서만 입증된 경우 임상시험은 불완전합니다.
- 장착 강성 검사: 브래킷이 눈에 띄게 움직일 수 있다면 테스트 결과가 승인할 만큼 안정적이지 않은 것입니다.
- 중심에서 벗어난 사례 검증: 실제 대상과 채우기 표면이 항상 완벽하게 중앙에 위치하는 것은 아닙니다.
- 사진과 치수로 형상을 기록합니다. 그렇지 않으면 이후의 실패를 원래 자격 부여 레이아웃과 비교할 수 없습니다.
모델 매핑
모델 결정은 하나의 하우징 크기에 대한 개인적 선호가 아니라 형상 병목 현상을 따라야 합니다. 이 주제에 대한 기본 권장 사항은 다음과 같습니다. MU30 센서 장거리 탱크 하드웨어보다 위치를 쉽게 유지하면서 가장 광범위한 중거리 탱크 및 일반 설치 사례를 다루기 때문입니다.
MU30: 일반 형상 주도 탱크 배치를 위한 주요 선택
MU30은 애플리케이션이 근거리 정밀도와 장거리 사일로 측정 사이에 있을 때 선별된 첫 번째 모델이어야 합니다. 현재 제품 창은 200~6000 mm이므로 설치에 실제 기하학적 제약이 있지만 전용 장거리 플랫폼이 필요하지 않은 많은 컨테이너, 상자 및 중간 높이 탱크에 적합합니다. 또한 조달 담당자가 범위를 더 짧게 또는 더 길게 이동할지 여부를 결정하기 전에 하나의 기준 견적을 원하는 경우에도 합리적인 참조 모델입니다.
MU18: 단단한 형상이 넓은 범위를 이길 때 사용
다음으로 이동 소형 MU18 옵션 지배적인 문제가 근접 장착, 짧은 사각지대 수요 또는 좁은 컨베이어 형상인 경우. MU18은 단순히 MU30의 더 작은 버전이 아닙니다. 실제 배포에서는 좁은 차선, 얕은 상자, 센서가 사용할 수 없는 영역에 너무 많은 공간을 주지 않고 대상에 가깝게 작동해야 하는 설치 등 다양한 기하학적 클래스를 해결합니다.
SR55: 탱크 높이 및 거부 마진이 증가할 때 위로 이동
MU30에서 다음으로 이동 SR55 탱크가 더 커지면 장착 거리가 늘어나거나 측면 벽 거부 문제가 범용 미드레인지 레이아웃이 편안하게 처리할 수 있는 것보다 더 심각해집니다. 현재 SR55 페이지는 IP68 보호를 280 ~ 4000 mm 범위 및 75 kHz 클래스 변환기와 결합하여 형상이 보다 전용 레벨 애플리케이션과 유사하기 시작할 때 적합합니다. 컨텍스트를 지원하려면 다음을 사용하세요. SR55 엔지니어링 가이드.
UltraNova2: 보호된 컴팩트 설치가 주요 제약인 경우 사용
Choose UltraNova2 프로젝트에 기존의 원통형 본체보다 더 콤팩트하고 보호되거나 표면 지향적인 설치가 필요한 경우. 이는 여전히 중거리 기능이 필요하지만 제한된 장비나 보호된 실외 프레임에서 돌출된 나사형 센서 본체의 기계적 패널티를 줄이려는 경우에 특히 유용합니다.
RFQ 체크리스트
공급업체가 올바른 기하학을 인용하도록 하려면 RFQ가 기하학을 직접 설명해야 합니다. 목표 범위와 출력 유형만 보내지 마십시오. 설치 봉투를 보내십시오.
- 범위: 최소, 보통, 최대 작동 거리.
- 환경: 먼지, 습기, 물 튀김, 온도 변화 및 공정 분위기.
- 출력 인터페이스: 스위칭, 아날로그 또는 디지털.
- 힘: 공급 창구 및 커넥터 기대치.
- 수량 + 리드타임: 샘플 수량, 파일럿 수량 및 예상 배송 시기.
- 탱크 직경: 감지 영역의 내부 너비.
- 노즐 직경/높이: 스탠드파이프를 사용하는 경우 매립 깊이와 파이프 상태를 포함합니다.
- 최소 측정 가능 수준: 공칭 전체 범위뿐만 아니라 가장 가까운 필수 지점입니다.
- 컨베이어 폭: 차선 폭, 레일 간격, 벨트 위 센서 높이.
- 대상 크기/간격: 이상적인 실험실 표적이 아닌 가장 작은 실제 물체입니다.
- 장착 방향: 하향식, 측면 보기, 매립형 또는 브래킷 장착형.
상업적 커뮤니케이션의 경우 RFQ을 복사하여 붙여넣을 수 있을 만큼 간단하면서도 기하학적 위험을 차단할 수 있을 만큼 상세하게 유지하세요. 그것을 통해 보내십시오 연락처 페이지 직접적인 기하학 검토가 필요할 때.
복사-붙여넣기 RFQ 시작
Application: Required range: Environment: Output interface: Power: Quantity: Lead-time: Tank diameter or conveyor width: Nozzle diameter / height or bracket stand-off: Minimum measurable level or smallest target size: Mounting orientation: Photos / sketches available: Yes / No
좋은 RFQ는 공급업체에게 무엇이 중요한지 추측하도록 요청하지 않습니다. 이는 기하학을 그것이 속한 첫 번째 토론 라운드로 강제합니다.
FAQ
범위가 정확하더라도 좁은 탱크에서 초음파 센서가 작동하지 않는 이유는 무엇입니까?
범위는 센서가 감지할 수 있는 거리만 나타내기 때문에 빔이 전체 측정 창에 걸쳐 벽, 노즐 또는 덮개로부터 격리된 상태로 유지되는지 여부는 알 수 없습니다. 좁은 탱크에서는 벽이 반향 경로의 일부가 되는 경우가 많습니다.
MU18이 MU30보다 나은 때는 언제인가요?
MU18은 코어 제약이 밀착 장착, 사각지대 수요가 짧거나 좁은 컨베이어 형상일 때 더 좋습니다. 시스템이 좁은 복도에서 작동해야 하는 경우 추가 범위 헤드룸보다 더 작은 폼 팩터가 더 중요할 수 있습니다.
구매자는 언제 MU30에서 SR55로 이동해야 합니까?
장착 거리, 탱크 높이 또는 필요한 벽 거부 마진으로 인해 애플리케이션이 범용 MU30 레이아웃의 편안한 기하학적 범위를 벗어나는 경우 SR55으로 이동합니다. 이는 보다 전용 탱크 형상을 사용하는 중거리 수준 작업에서 특히 그렇습니다.
얼마나 많은 벽 간격이 필요합니까?
간격은 격리 거리, 대상 특성 및 실제 설치 형상에 따라 달라지므로 단일 범용 숫자는 없습니다. 보수적인 규칙은 중간 범위뿐만 아니라 최악의 작업 지점에서 여유 공간을 평가하고 서류상으로는 거의 허용되지 않는 레이아웃을 검증하는 대신 여유를 두는 것입니다.
컨베이어 측면 레일로 인해 잘못된 감지가 발생할 수 있습니까?
예. 레일은 단단하고 반복 가능한 반사체입니다. 유효 발자국이 도달하면 특히 대상이 좁거나 부드럽거나 일관되지 않은 위치에 있을 때 의도한 제품보다 더 안정적인 에코를 생성할 수 있습니다.
샘플 테스트 중에 무엇을 검증해야 합니까?
최소 및 최대 작동 거리, 가장 작은 실제 대상, 중심에서 벗어난 조건, 장착 강성 및 인근 구조 반사경을 검증합니다. 하나의 이상적인 지점이 아니라 실제 설치 범위를 테스트할 때까지 샘플이 검증되지 않습니다.
필터링으로 잘못된 형상 레이아웃을 해결할 수 있습니까?
필터링을 하면 증상을 줄일 수 있지만 구조적 반향 경로 오류를 제거할 수는 없습니다. 벽, 레일 또는 노즐이 반복적으로 유용한 공간에 들어가는 경우 일반적으로 기계적 수정이 매개변수 조정보다 더 효과적입니다.
RFQ 이전에 2차 통과 검토를 원하는 팀의 경우 가장 강력한 작업 흐름은 간단합니다. 센서 제품 허브, 주변의 기하학을 비교해보세요 MU30, MU18, SR55그리고 UltraNova2, 그런 다음 기하학 패키지를 다음을 통해 보냅니다. contact 치수, 사진 및 실제 설치 제약 조건이 포함되어 있습니다.